The simulation of the robots inaugurated on present version 3.2.0 of the SimuPLC is still primitive and unpolished, but certainly brings significant gain in the interactivity of the simulation of controls involving PLC-based robots, industrial manipulators, autodriven vehicles and suchlike ones, whose utilization already occurs at limited way at present but tends in near future to became world wide into industrial, commercial and residential environments.
The interesting and defiant logic of functioning of robots should be understood by every professional that wants excel himself into competitive market of the programmable controls, making possible relevant and intelectually deep controls, of high didactic power, profound social reflection and large practice importance for the enrichment of the apprenticeship of PLC-based control programs.
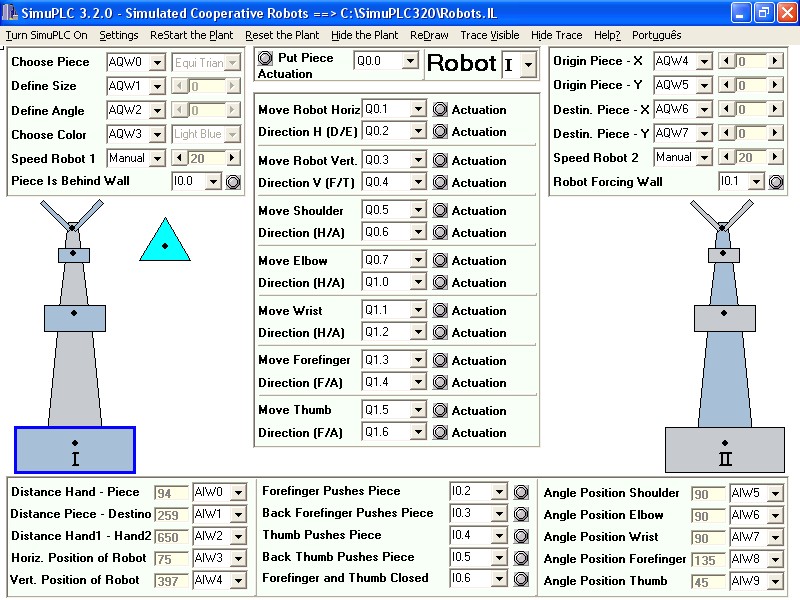
Our simulated cooperative pair of robots has several commands of moviment and sensors that allow we do analogy with some present in actual robots, what should make capable large scale of simulations of processes involving such machines and similar ones.
Obs.: although they have only seven free degrees and their moviments space is a simple rectangular surface, the controls for they developed can be easily expanded for robots with more free degrees and tridimensional moviments space, because the basic concepts for handling of the robotic moviments are the same in more complex and greater ones.
Clique on the elements below for details of the functioning: